前のチュートリアル: ハフ円変換
次のチュートリアル: リマッピング
| |
| 原著者 | Markus Heck |
| 互換性 | OpenCV >= 3.4 |
目的
このチュートリアルでは、以下の方法を学ぶ:
例
このプログラムは何をするか?
- 画像とテンプレートを読み込む


createGeneralizedHoughBallard() を使って cv::GeneralizedHoughBallard をインスタンス化するcreateGeneralizedHoughGuil() を使って cv::GeneralizedHoughGuil をインスタンス化する- 両方のGeneralizedHoughの方式について必要な引数を設定する
- 検出して見つかった結果を表示する
- 覚え書き
- どちらの方式も直接インスタンス化できない。createメソッドの使用が必要である。
- Guil Houghは非常に遅い。このチュートリアルで使用する「mini」ファイルの結果を計算するのは数秒で済む。下記のように、より高解像度の画像とテンプレートを使う場合、筆者のノートPCでは結果を計算するのに約5分かかる。


コード
このチュートリアルの完全なコードを以下に示す。
samples::addSamplesDataSearchSubDirectory("doc/tutorials/imgproc/generalized_hough_ballard_guil");
Mat image = imread(samples::findFile(
"images/generalized_hough_mini_image.jpg"));
Mat templ = imread(samples::findFile(
"images/generalized_hough_mini_template.jpg"), IMREAD_GRAYSCALE);
cvtColor(image, grayImage, COLOR_RGB2GRAY);
vector<Vec4f> positionBallard, positionGuil;
ballard->setMinDist(10);
ballard->setLevels(360);
ballard->setDp(2);
ballard->setMaxBufferSize(1000);
ballard->setVotesThreshold(40);
ballard->setCannyLowThresh(30);
ballard->setCannyHighThresh(110);
ballard->setTemplate(templ);
guil->setMinDist(10);
guil->setLevels(360);
guil->setDp(3);
guil->setMaxBufferSize(1000);
guil->setMinAngle(0);
guil->setMaxAngle(360);
guil->setAngleStep(1);
guil->setAngleThresh(1500);
guil->setMinScale(0.5);
guil->setMaxScale(2.0);
guil->setScaleStep(0.05);
guil->setScaleThresh(50);
guil->setPosThresh(10);
guil->setCannyLowThresh(30);
guil->setCannyHighThresh(110);
guil->setTemplate(templ);
ballard->detect(grayImage, positionBallard);
guil->detect(grayImage, positionGuil);
for (vector<Vec4f>::iterator iter = positionBallard.begin(); iter != positionBallard.end(); ++iter) {
Size2f(w * (*iter)[2], h * (*iter)[2]),
(*iter)[3]);
for (int i = 0; i < 4; i++)
line(image, vertices[i], vertices[(i + 1) % 4],
Scalar(255, 0, 0), 6);
}
for (vector<Vec4f>::iterator iter = positionGuil.begin(); iter != positionGuil.end(); ++iter) {
Size2f(w * (*iter)[2], h * (*iter)[2]),
(*iter)[3]);
for (int i = 0; i < 4; i++)
line(image, vertices[i], vertices[(i + 1) % 4],
Scalar(0, 255, 0), 2);
}
imshow("result_img", image);
waitKey();
return EXIT_SUCCESS;
}
n-dimensional dense array class
Definition mat.hpp:840
int cols
Definition mat.hpp:2204
int rows
the number of rows and columns or (-1, -1) when the matrix has more than 2 dimensions
Definition mat.hpp:2204
The class represents rotated (i.e. not up-right) rectangles on a plane.
Definition types.hpp:538
void points(Point2f pts[]) const
std::shared_ptr< _Tp > Ptr
Definition cvstd_wrapper.hpp:23
int main(int argc, char *argv[])
Definition highgui_qt.cpp:3
解説
画像とテンプレートの読み込みおよび変数の設定
samples::addSamplesDataSearchSubDirectory("doc/tutorials/imgproc/generalized_hough_ballard_guil");
Mat image =
imread(samples::findFile(
"images/generalized_hough_mini_image.jpg"));
Mat templ =
imread(samples::findFile(
"images/generalized_hough_mini_template.jpg"), IMREAD_GRAYSCALE);
cvtColor(image, grayImage, COLOR_RGB2GRAY);
vector<Vec4f> positionBallard, positionGuil;
位置ベクトルには、検出器が見つけたマッチが格納される。各エントリは4つの浮動小数点値を含む: 位置ベクトル
- [0]: 中心点のx座標
- [1]: 中心点のy座標
- [2]: テンプレートに対する検出物体のスケール
- [3]: テンプレートに対する検出物体の回転(度)
例は次のようになる: [200, 100, 0.9, 120]
パラメータの設定
ballard->setMinDist(10);
ballard->setLevels(360);
ballard->setDp(2);
ballard->setMaxBufferSize(1000);
ballard->setVotesThreshold(40);
ballard->setCannyLowThresh(30);
ballard->setCannyHighThresh(110);
ballard->setTemplate(templ);
guil->setMinDist(10);
guil->setLevels(360);
guil->setDp(3);
guil->setMaxBufferSize(1000);
guil->setMinAngle(0);
guil->setMaxAngle(360);
guil->setAngleStep(1);
guil->setAngleThresh(1500);
guil->setMinScale(0.5);
guil->setMaxScale(2.0);
guil->setScaleStep(0.05);
guil->setScaleThresh(50);
guil->setPosThresh(10);
guil->setCannyLowThresh(30);
guil->setCannyHighThresh(110);
guil->setTemplate(templ);
最適な値を見つけるには試行錯誤が必要となることがあり、画像解像度など多くの要因に依存する。
検出の実行
ballard->detect(grayImage, positionBallard);
guil->detect(grayImage, positionGuil);
上述のとおり、このステップにはある程度の時間がかかる。特に大きな画像の場合やGuilを使用する場合に顕著である。
結果の描画と画像の表示
for (vector<Vec4f>::iterator iter = positionBallard.begin(); iter != positionBallard.end(); ++iter) {
Size2f(w * (*iter)[2], h * (*iter)[2]),
(*iter)[3]);
for (int i = 0; i < 4; i++)
line(image, vertices[i], vertices[(i + 1) % 4],
Scalar(255, 0, 0), 6);
}
for (vector<Vec4f>::iterator iter = positionGuil.begin(); iter != positionGuil.end(); ++iter) {
Size2f(w * (*iter)[2], h * (*iter)[2]),
(*iter)[3]);
for (int i = 0; i < 4; i++)
line(image, vertices[i], vertices[(i + 1) % 4],
Scalar(0, 255, 0), 2);
}
結果
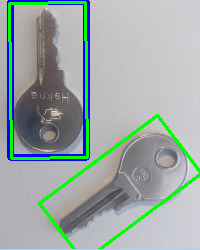
result image
青い矩形は cv::GeneralizedHoughBallard の結果を、緑の矩形は cv::GeneralizedHoughGuil の結果を示す。
引数がサンプルに完全に適合していなければ、この例のような完璧な結果を得ることは難しい。あまり完璧でない引数を用いた例を以下に示す。Ballardの方式では、この画像上では結果の中心のみが黒い点として示されている。矩形は前の画像と同じになる。

less perfect result