|
OpenCV 5.0.0
Open Source Computer Vision
|
読み込み中...
検索中...
見つかりません
|
OpenCV 5.0.0
Open Source Computer Vision
|
前のチュートリアル: Orbbec Astra 3D カメラの使用
次のチュートリアル: Creative Senz3D およびその他の Intel RealSense SDK 互換深度センサーの使用
| 原著者 | Jinyue Chen |
| 互換性 | OpenCV >= 4.10 |
このチュートリアルは、UVCプロトコルに基づく Orbbec の3Dカメラを対象とする。OpenNI に依存する旧型の Orbbec 3Dカメラの使用については、前のチュートリアルを参照のこと。
OpenNI2 SDK 付きでビルドした OpenCV を必要とする OpenNI ベースの Astra 3D カメラの利用とは異なり、OpenCV 経由で Orbbec UVC 3D カメラにアクセスするのに Orbbec SDK のインストールは不要である。cv::VideoCapture クラスを使うことで、USB カメラを扱うのと同様に、3D カメラからストリームデータを取得できる。深度マップとカラー画像のキャリブレーションおよびアライメントは内部で行われる。
3D カメラを OpenCV で使用するには、OpenCV をインストールするための Get Started を参照するとよい。
4.11 以降、Mac OS ユーザーがこれらのカメラを使用するには、フラグ -DOBSENSOR_USE_ORBBEC_SDK=ON を付けてソースから OpenCV をコンパイルする必要があることに注意:
デフォルトでは、-DOBSENSOR_USE_ORBBEC_SDK=ON が有効な場合、OrbbecSDK v2 が使用される(すなわち ORBBEC_SDK_VERSION のデフォルトは 2)。これは Orbbec Gemini 330 シリーズ全体をサポートする。
Orbbec Femto、Gemini2XL、Astra+ などのレガシーカメラが必要な場合は、フラグ -DORBBEC_SDK_VERSION=1 で OrbbecSDK v1 に切り替える:
cv.VideoCapture(0, cv.CAP_OBSENSOR) を使って最初のOrbbec深度センサーデバイスを開こうとする。カメラのオープンに失敗した場合、プログラムは終了し、エラーメッセージを表示する。orbbec_cap.grab() メソッドはフレームの取得を試みる。orbbec_cap.retrieve(None, cv.CAP_OBSENSOR_BGR_IMAGE) を使ってBGR画像データを取得する。取得に成功すると、cv.imshow("BGR", bgr_image) を使ってBGR画像をウィンドウに表示する。orbbec_cap.retrieve(None, cv.CAP_OBSENSOR_DEPTH_MAP) を使って深度画像データを取得する。取得に成功すると、まず深度画像を0から255の範囲に正規化し、次に疑似カラー画像を適用して、その結果を cv.imshow("DEPTH", color_depth_map) を使ってウィンドウに表示する。cv.pollKey() を使ってキーボードイベントを検出する。キーが押されると、ループを抜けてプログラムが終了する。orbbec_cap.release() を使ってカメラリソースを解放する。VideoCapture obsensorCapture(0, CAP_OBSENSOR) を使って最初のOrbbec深度センサーデバイスを開こうとする。カメラのオープンに失敗した場合、エラーメッセージが表示され、プログラムは終了する。obsensorCapture.get() を使って、焦点距離 (fx, fy) や主点 (cx, cy) を含むカメラの内部パラメータを取得する。obsensorCapture.grab() メソッドはフレームの取得を試みる。obsensorCapture.retrieve(image, CAP_OBSENSOR_BGR_IMAGE) を使ってBGR画像データを取得する。取得に成功すると、imshow("BGR", image) を使ってBGR画像をウィンドウに表示する。obsensorCapture.retrieve(depthMap, CAP_OBSENSOR_DEPTH_MAP) を使って深度画像データを取得する。取得に成功すると、深度画像を正規化して疑似カラー画像を適用し、その結果を imshow("DEPTH", adjDepthMap) を使ってウィンドウに表示する。取得される深度値はミリメートル単位であり、300から5000(ミリメートル)の範囲に切り詰められる。この固定範囲は、深度カメラの深度レンジに基づく切り詰めとして解釈でき、深度マップ上の無効なピクセルを除去する。alpha) でBGR画像に重ね合わせる。重ね合わせた画像は imshow("DepthToColor", image) を使ってウィンドウに表示する。pollKey() を使ってキーボードイベントを検出する。キーが押されると、ループを抜けてプログラムが終了する。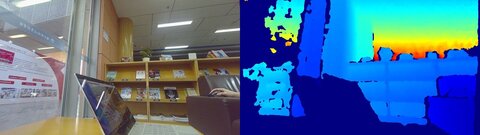

sudo 権限が必要である。