|
OpenCV 4.13.0
Open Source Computer Vision
|
読み込み中...
検索中...
見つかりません
|
OpenCV 4.13.0
Open Source Computer Vision
|
前のチュートリアル: ArUcoマーカーの検出
次のチュートリアル: ChArUcoボードの検出
| 原著者 | Sergio Garrido, Alexander Panov |
| 互換性 | OpenCV >= 4.7.0 |
ArUcoボードは、カメラに対して単一の姿勢を提供するという意味で、単一のマーカーのように振る舞うマーカーの集合である。
最も一般的なボードは、すべてのマーカーが同一平面上にあるものである。簡単に印刷できるためである:
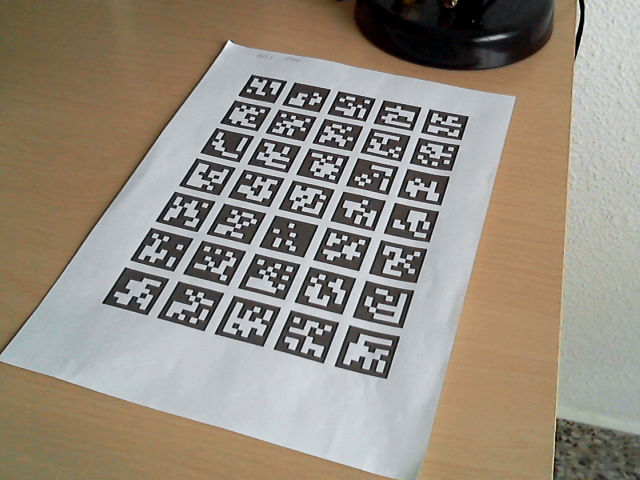
ただし、ボードはこの配置に限定されるわけではなく、任意の2Dまたは3Dレイアウトを表現できる。
ボードと独立したマーカーの集合との違いは、ボード内のマーカー間の相対位置があらかじめわかっている点にある。これにより、すべてのマーカーのコーナーを用いて、ボード全体に対するカメラの姿勢を推定できる。
独立したマーカーの集合を使用する場合、環境内でのマーカーの相対位置がわからないため、各マーカーの姿勢を個別に推定することになる。
ボードを使用する主な利点は次のとおりである:
ボードの検出は標準的なマーカー検出と同様である。唯一の違いは姿勢推定のステップにある。実際、マーカーボードを使用するには、ボードの姿勢を推定する前に標準的なマーカー検出を行う必要がある。
ボードの姿勢推定を行うには、以下に samples/cpp/tutorial_code/objectDetection/detect_board.cpp で示すように、solvePnP() 関数を使用する必要がある。
引数は次のとおりである:
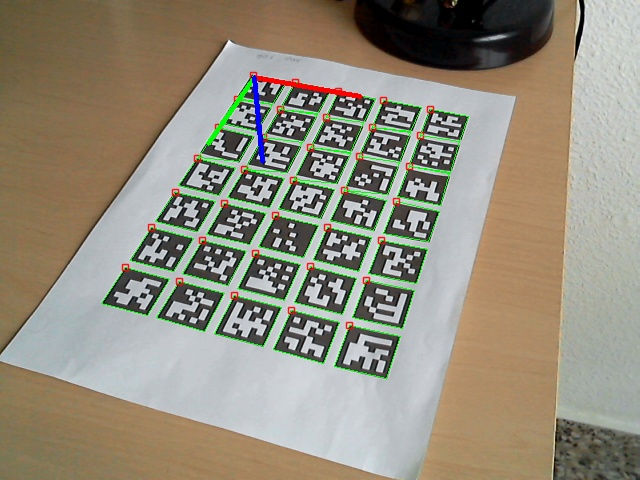
objPoints, imgPoints オブジェクト点と画像点であり、cv::aruco::GridBoard::matchImagePoints() によって対応付けられる。この関数は、cv::aruco::ArucoDetector::detectMarkers() 関数で検出されたマーカーの markerCorners および markerIds 構造体を入力として受け取る。board ボードのレイアウトとそのidを定義する cv::aruco::Board オブジェクトcameraMatrix および distCoeffs: 姿勢推定に必要なカメラキャリブレーション引数。rvec および tvec: ボードの推定姿勢。空でない場合は初期推定値として扱われる。drawFrameAxes() 関数を用いて、得られた姿勢を確認できる。例えば:
そしてこれは、ボードが部分的にオクルージョンされた別の例である:
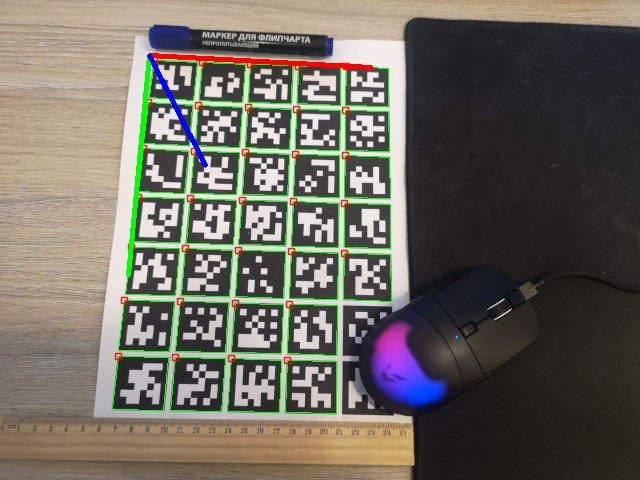
ご覧のとおり、一部のマーカーが検出されていなくても、残りのマーカーからボードの姿勢を推定できる。
サンプル動画:
完全に動作する例は、samples/cpp/tutorial_code/objectDetection/ 内の detect_board.cpp に含まれている。
サンプルは、cv::CommandLineParser を介してコマンドラインから入力を受け取るようになっている。このファイルの場合、例として用いる引数は次のようになる:
detect_board.cpp の引数:
cv::aruco::Board オブジェクトの作成には、環境内の各マーカーのコーナー位置を指定する必要がある。ただし多くの場合、ボードは同一平面上にグリッド状に配置されたマーカーの集合にすぎないため、簡単に印刷して使用できる。
幸い、arucoモジュールは、この種のマーカーを簡単に作成・印刷するための基本機能を提供している。
cv::aruco::GridBoard クラスは cv::aruco::Board クラスを継承する特殊なクラスであり、次の画像のように、すべてのマーカーが同一平面上にグリッド状に配置されたボードを表す:
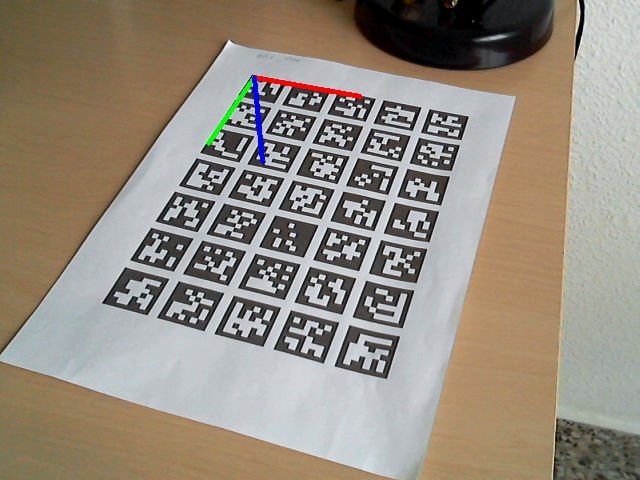
具体的には、グリッドボードの座標系はボード平面上に位置し、ボードの左下隅を原点とし、Zが外側を向くように配置される。次の画像のとおりである (X:赤, Y:緑, Z:青):
cv::aruco::GridBoard オブジェクトは、以下の引数を用いて定義できる:
このオブジェクトは、これらの引数から cv::aruco::GridBoard コンストラクタを用いて簡単に作成できる:
したがって、このボードは5x7=35個のマーカーで構成される。各マーカーのidは、デフォルトでは0から昇順に割り当てられるため、0, 1, 2, ..., 34となる。
グリッドボードを作成したら、おそらくそれを印刷して使用したいだろう。これには2つの方法がある:
apps/pattern-tools/generate_pattern.py を使用する。キャリブレーションパターンの作成を参照。cv::aruco::GridBoard::generateImage() 関数を使用する。cv::aruco::GridBoard::generateImage() 関数は cv::aruco::GridBoard クラスで提供されており、以下のコードを用いて呼び出せる:
boardImage: ボードが描かれた出力画像。generateImageMarker() 関数と同様に、マーカーの境界のサイズを指定する。デフォルト値は1である。ボード作成の完全に動作する例は、samples/cpp/tutorial_code/objectDetection/create_board.cpp に含まれている
出力画像は次のようになる:
このサンプルは現在、cv::CommandLineParser を介してコマンドラインから入力を受け取る。このファイルの場合、例のパラメータは次のようになる:
ArUcoボードは、マーカーの検出を改善するためにも利用できる。ボードに属するマーカーの一部を検出済みの場合、これらのマーカーとボードのレイアウト情報を用いて、まだ検出されていないマーカーを見つけることができる。
これは cv::aruco::refineDetectedMarkers() 関数を用いて行える。この関数は cv::aruco::ArucoDetector::detectMarkers() を呼び出した後に呼び出す必要がある。
この関数の主な引数は、マーカーが検出された元の画像、ボードオブジェクト、検出されたマーカーのコーナー、検出されたマーカーのid、および棄却されたマーカーのコーナーである。
棄却されたコーナーは cv::aruco::ArucoDetector::detectMarkers() 関数から取得でき、マーカー候補とも呼ばれる。これらの候補は、元の画像内で見つかった正方形の形状であるが、識別ステップを通過できなかったもの (すなわち内部の符号化に誤りが多すぎるもの) であり、そのためマーカーとして認識されなかったものである。
ただし、これらの候補は、画像中の高ノイズ、非常に低い解像度、その他バイナリコードの抽出に影響する関連する問題のために正しく識別されなかった、実際のマーカーである場合もある。cv::aruco::ArucoDetector::refineDetectedMarkers() 関数は、これらの候補とボードの欠落しているマーカーとの間の対応を見つける。この探索は2つの引数に基づく:
refineDetectedMarkers() の minRepDistance 引数は、候補コーナーと投影されたマーカーコーナーとの間の最小ユークリッド距離を決定する(デフォルト値10)。errorCorrectionRate 引数で指定する(デフォルト値3.0)。負の値が与えられた場合、内部ビットはまったく解析されず、コーナー距離のみが評価される。これは cv::aruco::ArucoDetector::refineDetectedMarkers() 関数を使用する例である:
また、場合によっては、最初に検出されたマーカーの数が少なすぎると(例えばマーカーが1つか2つしかない場合)、検出されなかったマーカーの投影の品質が悪くなり、誤った対応付けを生じることがある点にも注意する必要がある。
より詳細な実装については、モジュールのサンプルを参照すること。